Our mission is to create lightweight, customized and sensorized prosthetic arms by combining two innovative design paradigms: Additive manufacturing, and the Lattice structures which can allow a fully versatilty of the design combined with a reduced weight, and the possibility of applying the sensorization in specific spots.
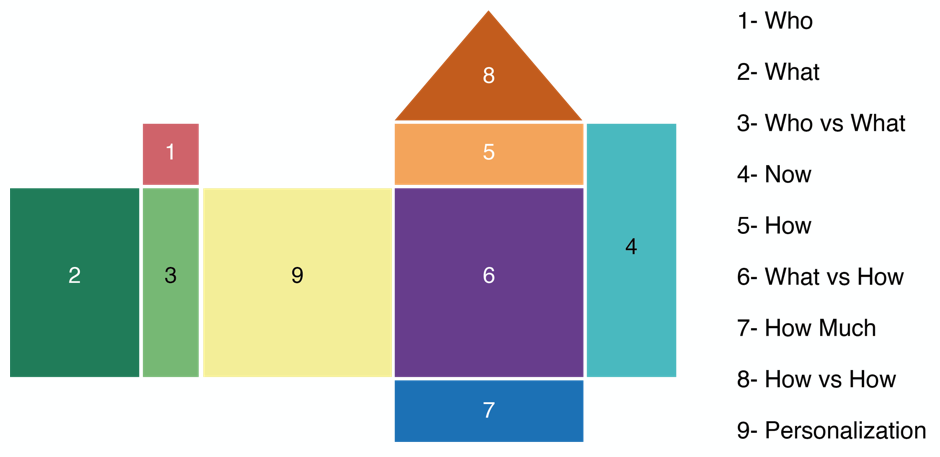
We propose a House of Quality (HoQ) framework that integrates individual user preferences and personalizes prosthetic design to better meet each user’s needs. Its purpose is to explicitly capture unique preferences, expectations, desires, and priorities, thereby reinforcing the user-centered nature of the design process and enhancing the relevance and acceptance of the final prosthetic solution.
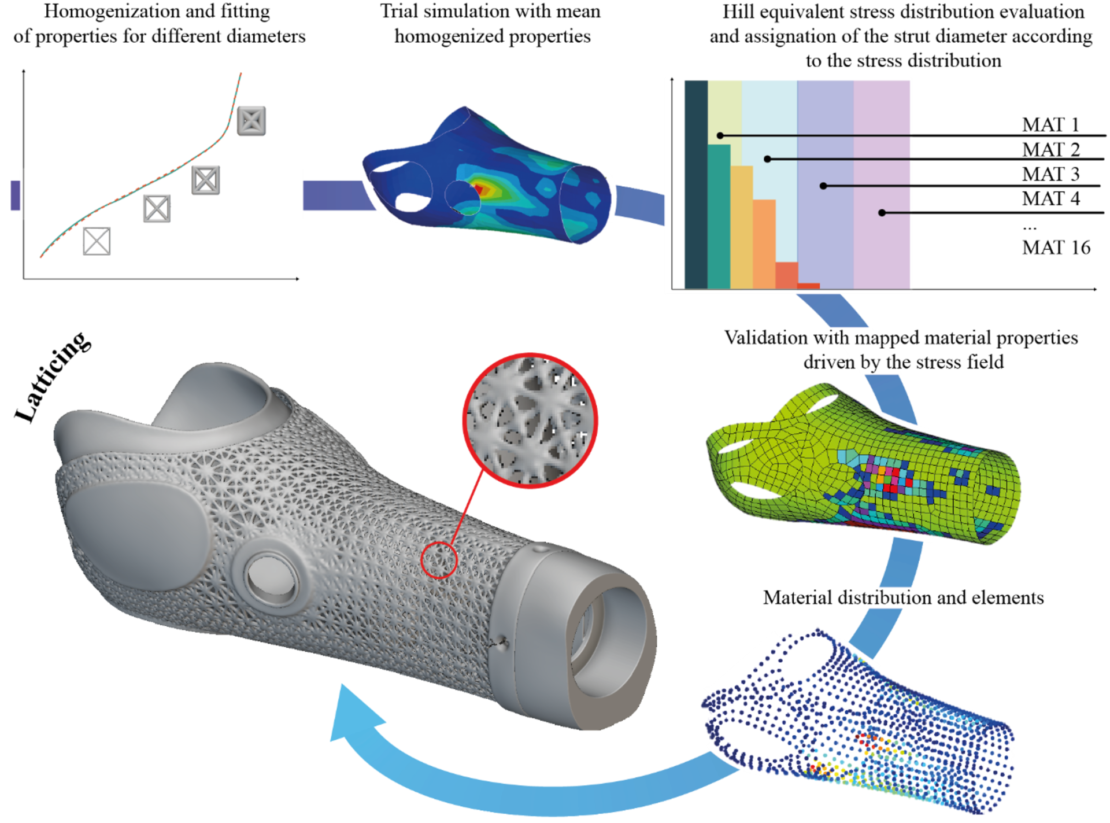
A field-driven optimization workflow is adopted for the prosthetic socket of Lattice structure. Finite element analysis of the homogenized socket shell is first performed to obtain the spatial distribution of equivalent stress. This distribution is then discretized into stress intervals and mapped to corresponding sets of homogenized material properties. Based on this mapping, a stress-to-diameter relationship is derived and used to assign locally varying lattice strut sizes, ultimately resulting in an optimized lattice-based socket geometry.
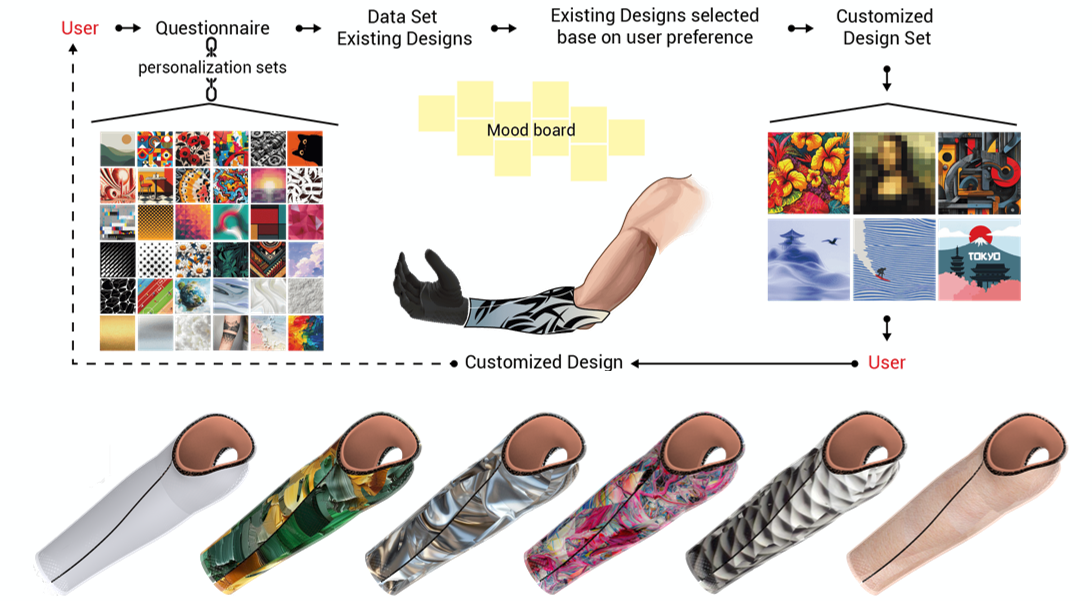
User-driven aesthetic customization for the cover process is implemented using image-based clustering and generative design tools. The workflow begins with user input collected through dedicated image selections, which are then analysed using clustering techniques based on both visual and semantic features. The resulting clusters are used to generate mood boards that capture the user’s stylistic preferences and translate them into design attributes.
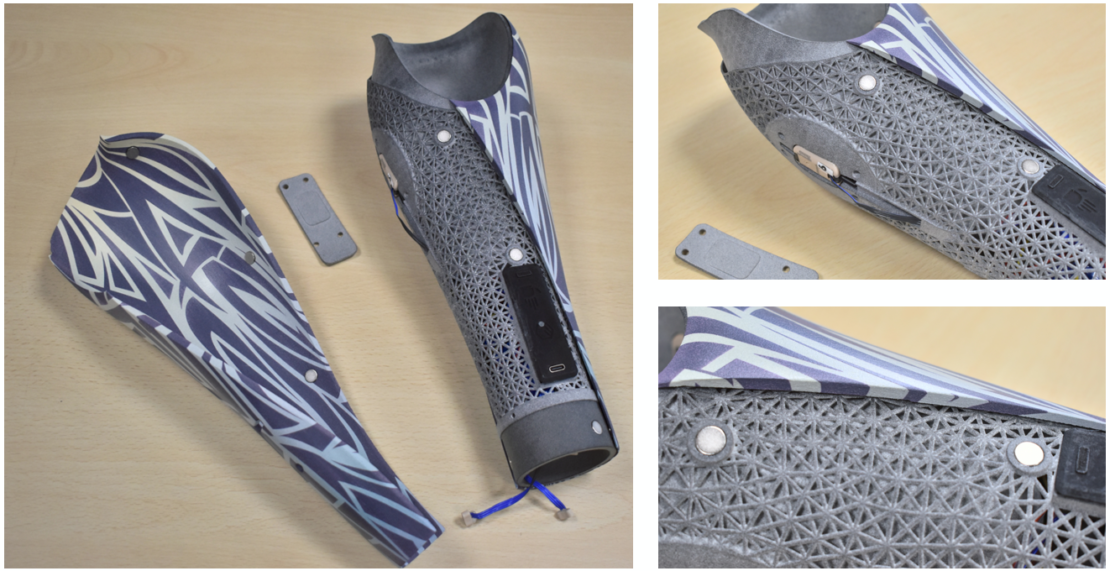
A final demonstrator of the forearm socket is produced in PA12, manufactured with the MJF process, and a cover in same material is applied. Specific features are applied to allow sensorization and cabling, and also to insert small permanent magnets for the cover.
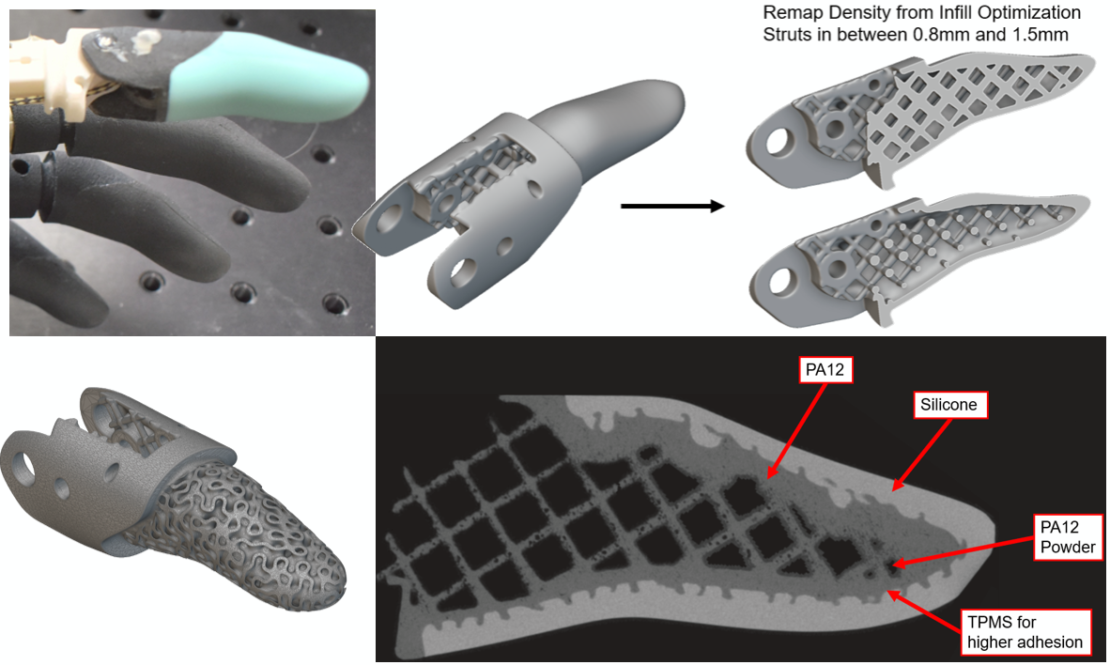
A strain gage configuration is applied to the proximal phalanx for load sensorization of the finger as evident in the demonstrator produced. Once the optimal sensor configuration is identified, the structural design of the proximal phalanx is refined through geometric modifications inspired by load cell design principles. Cavities are primarily introduced to filter the mechanical actions transmitted to the sensing region and to promote a predominantly uniaxial strain state. The sensorized finger is then tested under representative grasping conditions: lateral grasp configuration, pinch/power grasp configuration, extended finger with load applied at the fingertip.

The final PA12 fingertip design features an optimized geometry that includes both the external shell and internal structural elements. Within this configuration, a TPMS Gyroid interfacial lattice is integrated into the fingertip to create a porous interface, specifically designed to promote mechanical interlocking between the PA12 structure and the silicone layer. Computed tomography (CT) analysis of the resulting prototype confirms the effectiveness of this approach, showing the internal cross section of the fingertip with the embedded Gyroid lattice and demonstrating complete silicone infiltration throughout the porous interface.